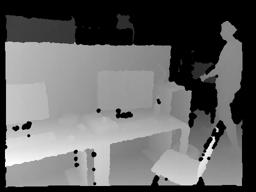
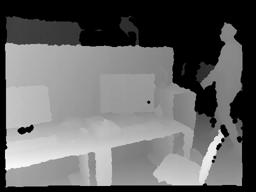
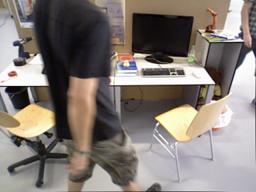
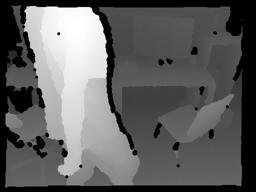
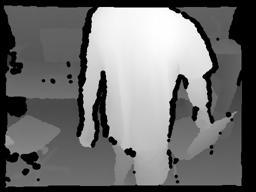
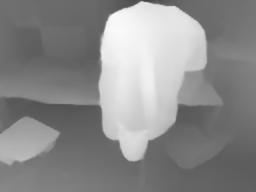
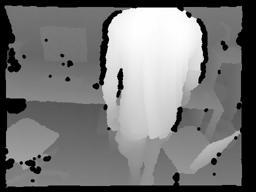
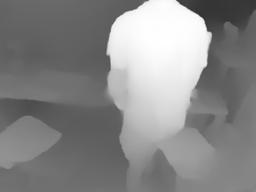
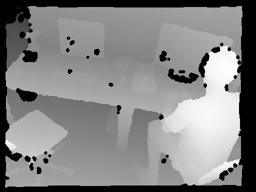
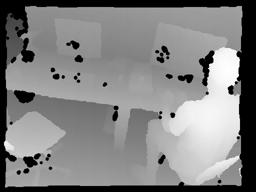
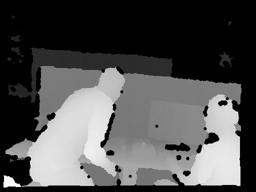
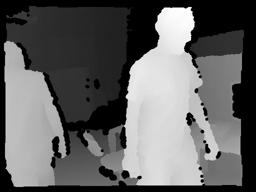
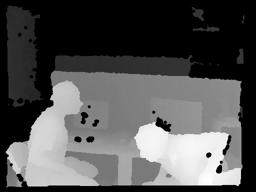
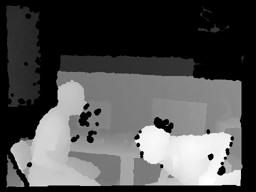
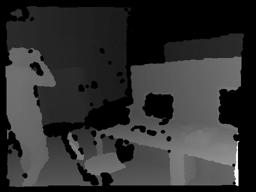
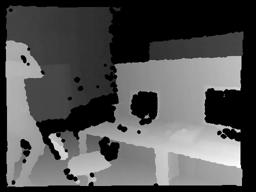
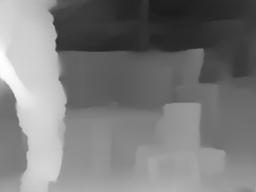
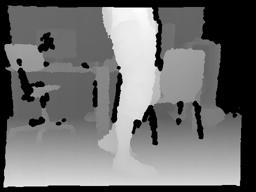
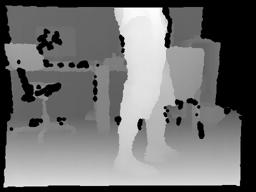
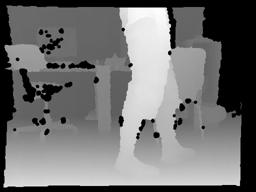
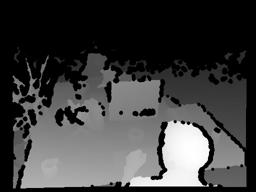
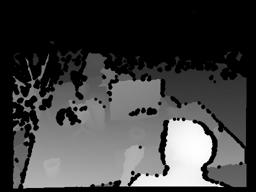
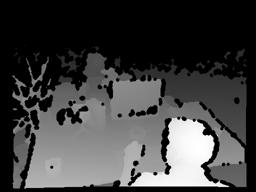
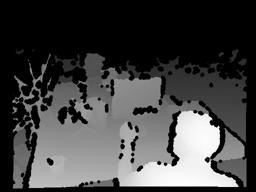
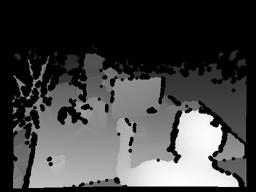
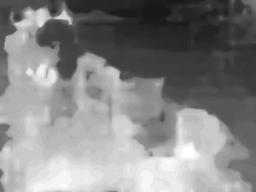
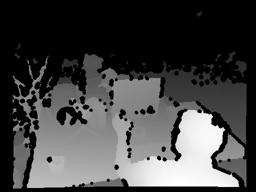
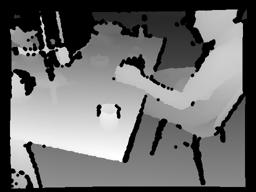
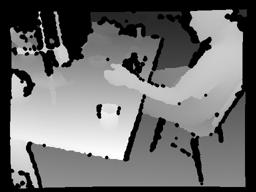
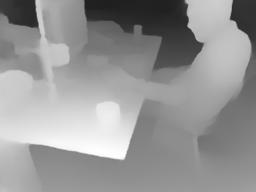
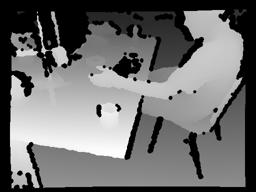
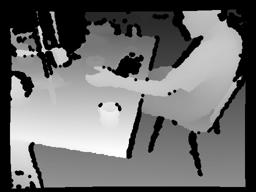
Additional Results on TUM Dataset and Comparisons
Image
GT Depth
DeMoN
DORN
Ours (RGB)
Ours (full)





JAOQszQe2Ug_10033333





JAOQszQe2Ug_10100000






JAOQszQe2Ug_1266667




JAOQszQe2Ug_13933333




JAOQszQe2Ug_14166667





JAOQszQe2Ug_14200000





JAOQszQe2Ug_14233333





JAOQszQe2Ug_14400000






JAOQszQe2Ug_14433333






JAOQszQe2Ug_14533333






JAOQszQe2Ug_14566667






JAOQszQe2Ug_14600000






JAOQszQe2Ug_14666667





JAOQszQe2Ug_14733333






JAOQszQe2Ug_14766667






JAOQszQe2Ug_14800000





JAOQszQe2Ug_14833333





JAOQszQe2Ug_14900000






JAOQszQe2Ug_14933333






JAOQszQe2Ug_14966667






JAOQszQe2Ug_15133333






JAOQszQe2Ug_15166667






JAOQszQe2Ug_15300000





JAOQszQe2Ug_16000000





JAOQszQe2Ug_16066667






JAOQszQe2Ug_17266667






JAOQszQe2Ug_17366667






JAOQszQe2Ug_17466667





JAOQszQe2Ug_18133333






JAOQszQe2Ug_233333






JAOQszQe2Ug_2333333






JAOQszQe2Ug_2533333





JAOQszQe2Ug_2566667






JAOQszQe2Ug_2666667





JAOQszQe2Ug_266667






JAOQszQe2Ug_2866667






JAOQszQe2Ug_2900000





JAOQszQe2Ug_300000





JAOQszQe2Ug_3333333





JAOQszQe2Ug_3533333






KDWm2mJrR7s_12700000






KDWm2mJrR7s_12733333





KDWm2mJrR7s_13066667






KDWm2mJrR7s_13533333





KDWm2mJrR7s_13833333






KDWm2mJrR7s_13900000





KDWm2mJrR7s_13933333





KDWm2mJrR7s_13966667





KDWm2mJrR7s_14000000





KDWm2mJrR7s_14033333






KDWm2mJrR7s_14066667





KDWm2mJrR7s_14300000






KDWm2mJrR7s_21500000






KDWm2mJrR7s_21566667






KDWm2mJrR7s_21633333





KDWm2mJrR7s_21666667






KDWm2mJrR7s_21700000






KDWm2mJrR7s_21733333






KDWm2mJrR7s_21966667






KDWm2mJrR7s_22000000






KDWm2mJrR7s_22033333






KDWm2mJrR7s_23300000






KDWm2mJrR7s_23366667






KDWm2mJrR7s_23400000






KDWm2mJrR7s_23833333






KDWm2mJrR7s_23866667






KDWm2mJrR7s_23900000






KDWm2mJrR7s_23933333






KDWm2mJrR7s_23966667






KDWm2mJrR7s_24000000






KDWm2mJrR7s_24566667






KDWm2mJrR7s_24633333






KDWm2mJrR7s_24833333






KDWm2mJrR7s_25066667






KDWm2mJrR7s_25100000






KDWm2mJrR7s_25200000






KDWm2mJrR7s_25366667






UWcVzeKcp1Y_81633333






UWcVzeKcp1Y_81666667






UWcVzeKcp1Y_81733333






UWcVzeKcp1Y_81766667






UWcVzeKcp1Y_81800000






UWcVzeKcp1Y_81833333






UWcVzeKcp1Y_81866667






UWcVzeKcp1Y_81900000






UWcVzeKcp1Y_81933333






UWcVzeKcp1Y_81966667






UWcVzeKcp1Y_82033333





UWcVzeKcp1Y_83533333





UWcVzeKcp1Y_83600000





UWcVzeKcp1Y_83633333






UWcVzeKcp1Y_83666667






UWcVzeKcp1Y_83766667






UWcVzeKcp1Y_83800000





UWcVzeKcp1Y_83866667





UWcVzeKcp1Y_83933333





UWcVzeKcp1Y_83966667





UWcVzeKcp1Y_84000000






UWcVzeKcp1Y_84033333






UWcVzeKcp1Y_94600000





UWcVzeKcp1Y_94633333






UWcVzeKcp1Y_94666667




UWcVzeKcp1Y_94700000





UWcVzeKcp1Y_94800000





UWcVzeKcp1Y_94833333





ZL1tYG0uZu4_1000000